|
Plasma Engine
2.0
|
|
Plasma Engine
2.0
|
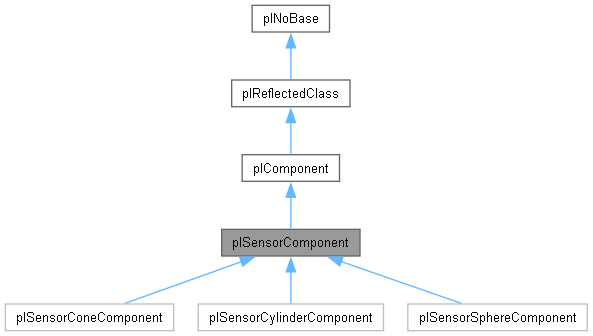
Base class for sensor components that can be used for AI perception like vision or hearing. More...
#include <SensorComponent.h>
Public Member Functions | |
| virtual void | SerializeComponent (plWorldWriter &inout_stream) const override |
| Override this to save the current state of the component to the given stream. | |
| virtual void | DeserializeComponent (plWorldReader &inout_stream) override |
| Override this to load the current state of the component from the given stream. | |
| virtual void | GetObjectsInSensorVolume (plDynamicArray< plGameObject * > &out_objects) const =0 |
| virtual void | DebugDrawSensorShape () const =0 |
| void | SetSpatialCategory (const char *szCategory) |
| const char * | GetSpatialCategory () const |
| void | SetUpdateRate (const plEnum< plUpdateRate > &updateRate) |
| const plEnum< plUpdateRate > & | GetUpdateRate () const |
| void | SetShowDebugInfo (bool bShow) |
| bool | GetShowDebugInfo () const |
| void | SetColor (plColorGammaUB color) |
| plColorGammaUB | GetColor () const |
| plArrayPtr< const plGameObjectHandle > | GetLastDetectedObjects () const |
| Returns the list of objects that this sensor has detected during its last update. | |
| bool | RunSensorCheck (plPhysicsWorldModuleInterface *pPhysicsWorldModule, plDynamicArray< plGameObject * > &out_objectsInSensorVolume, plDynamicArray< plGameObjectHandle > &ref_detectedObjects, bool bPostChangeMsg) const |
| Updates the sensor state right now. | |
 Public Member Functions inherited from plComponent Public Member Functions inherited from plComponent | |
| void | SetActiveFlag (bool bEnabled) |
| Sets the active flag of the component, which affects its active state. | |
| bool | GetActiveFlag () const |
| Checks whether the 'active flag' is set on this component. Note that this does not mean that the component is also 'active'. | |
| bool | IsActive () const |
| Checks whether this component is in an active state. | |
| bool | IsActiveAndInitialized () const |
| Returns whether this component is active and initialized. | |
| bool | IsActiveAndSimulating () const |
| Whether the component is currently active and simulation has been started as well. | |
| plComponentManagerBase * | GetOwningManager () |
| Returns the corresponding manager for this component. | |
| const plComponentManagerBase * | GetOwningManager () const |
| Returns the corresponding manager for this component. | |
| plGameObject * | GetOwner () |
| Returns the owner game object if the component is attached to one or nullptr. | |
| const plGameObject * | GetOwner () const |
| Returns the owner game object if the component is attached to one or nullptr. | |
| plWorld * | GetWorld () |
| Returns the corresponding world for this component. | |
| const plWorld * | GetWorld () const |
| Returns the corresponding world for this component. | |
| plComponentHandle | GetHandle () const |
| Returns a handle to this component. | |
| plUInt32 | GetUniqueID () const |
| Returns the unique id for this component. | |
| void | SetUniqueID (plUInt32 uiUniqueID) |
| Sets the unique id for this component. | |
| void | EnsureInitialized () |
| Ensures that the component is initialized. Must only be called from another component's Initialize callback. | |
| void | EnsureSimulationStarted () |
| Ensures that the OnSimulationStarted method has been called. Must only be called from another component's OnSimulationStarted callback. | |
| PL_ALWAYS_INLINE bool | SendMessage (plMessage &ref_msg) |
| Sends a message to this component. | |
| PL_ALWAYS_INLINE bool | SendMessage (plMessage &ref_msg) const |
| void | PostMessage (const plMessage &msg, plTime delay=plTime::MakeZero(), plObjectMsgQueueType::Enum queueType=plObjectMsgQueueType::NextFrame) const |
| Queues the message for the given phase. The message is processed after the given delay in the corresponding phase. | |
| virtual bool | HandlesMessage (const plMessage &msg) const |
| Returns whether the given Message is handled by this component. | |
| void | SetUserFlag (plUInt8 uiFlagIndex, bool bSet) |
| Be careful to check which flags may already be in use by base classes. | |
| bool | GetUserFlag (plUInt8 uiFlagIndex) const |
| Retrieves a custom flag. Index must be between 0 and 7. | |
| void | SetCreatedByPrefab () |
| Adds plObjectFlags::CreatedByPrefab to the component. See the flag for details. | |
| bool | WasCreatedByPrefab () const |
| Checks whether the plObjectFlags::CreatedByPrefab flag is set on this component. | |
| Public Member Functions inherited from plReflectedClass | |
| virtual const plRTTI * | GetDynamicRTTI () const |
| bool | IsInstanceOf (const plRTTI *pType) const |
| Returns whether the type of this instance is of the given type or derived from it. | |
| template<typename T > | |
| PL_ALWAYS_INLINE bool | IsInstanceOf () const |
| Returns whether the type of this instance is of the given type or derived from it. | |
Public Attributes | |
| bool | m_bTestVisibility = true |
| plUInt8 | m_uiCollisionLayer = 0 |
| plTagSet | m_IncludeTags |
| plTagSet | m_ExcludeTags |
Protected Member Functions | |
| virtual void | OnActivated () override |
| This method is called when the component gets activated. | |
| virtual void | OnDeactivated () override |
| This method is called when the component gets deactivated. | |
| void | UpdateSpatialCategory () |
| void | UpdateScheduling () |
| void | UpdateDebugInfo () |
| Protected Member Functions inherited from plComponent | |
| plComponent () | |
| Keep the constructor private or protected in derived classes, so it cannot be called manually. | |
| bool | IsDynamic () const |
| Returns whether this component is dynamic and thus can only be attached to dynamic game objects. | |
| virtual plWorldModuleTypeId | GetTypeId () const =0 |
| virtual plComponentMode::Enum | GetMode () const =0 |
| virtual void | Initialize () |
| Can be overridden for basic initialization that depends on a valid hierarchy and position. | |
| virtual void | Deinitialize () |
| This method is called before the component is destroyed. A derived type can override this method to do common de-initialization work. | |
| virtual void | OnSimulationStarted () |
| This method is called once for active components, at the start of the next world update, but only when the world is simulated. | |
| void | EnableUnhandledMessageHandler (bool enable) |
| By default disabled. Enable to have OnUnhandledMessage() called for every unhandled message. | |
| virtual bool | OnUnhandledMessage (plMessage &msg, bool bWasPostedMsg) |
| When EnableUnhandledMessageHandler() was activated, this is called for all messages for which there is no dedicated message handler. | |
| virtual bool | OnUnhandledMessage (plMessage &msg, bool bWasPostedMsg) const |
| When EnableUnhandledMessageHandler() was activated, this is called for all messages for which there is no dedicated message handler. | |
| bool | IsInitialized () const |
| bool | IsInitializing () const |
| bool | IsSimulationStarted () const |
Protected Attributes | |
| plEnum< plUpdateRate > | m_UpdateRate |
| bool | m_bShowDebugInfo = false |
| plColorGammaUB | m_Color = plColorScheme::LightUI(plColorScheme::Orange) |
| plHashedString | m_sSpatialCategory |
| plSpatialData::Category | m_SpatialCategory = plInvalidSpatialDataCategory |
| plDynamicArray< plGameObjectHandle > | m_LastDetectedObjects |
| Protected Attributes inherited from plComponent | |
| const plRTTI * | m_pMessageDispatchType = nullptr |
| Messages will be dispatched to this type. Default is what GetDynamicRTTI() returns, can be redirected if necessary. | |
Friends | |
| class | plSensorWorldModule |
Additional Inherited Members | |
| Static Public Member Functions inherited from plNoBase | |
| static const plRTTI * | GetStaticRTTI () |
Base class for sensor components that can be used for AI perception like vision or hearing.
Derived component classes implemented different shapes like sphere cylinder or cone. All sensors do a query with the specified spatial category in the world's spatial system first, therefore it is necessary to have objects with matching spatial category for the sensors to detect them. This can be achieved with components like e.g. plMarkerComponent. Visibility tests via raycasts are done afterwards by default but can be disabled. The components store an array of all their currently detected objects and send an plMsgSensorDetectedObjectsChanged message if this array changes.
|
overridevirtual |
Override this to load the current state of the component from the given stream.
The active state will be automatically serialized. The 'initialized' state is not serialized, all components will be initialized after creation, even if they were already in an initialized state when they were serialized.
Reimplemented from plComponent.
Reimplemented in plSensorConeComponent, plSensorCylinderComponent, and plSensorSphereComponent.
|
overrideprotectedvirtual |
This method is called when the component gets activated.
By default a component is active, but it can be created in an inactive state. In such a case OnActivated() is only called once a component is activated. If a component gets switched between active and inactive at runtime, OnActivated() and OnDeactivated() are called accordingly. In contrast Initialize() and Deinitialize() are only ever called once.
Reimplemented from plComponent.
|
overrideprotectedvirtual |
This method is called when the component gets deactivated.
Upon destruction, a component that is active first gets deactivated. Therefore OnDeactivated() should be used for typical game code cleanup.
Reimplemented from plComponent.
| bool plSensorComponent::RunSensorCheck | ( | plPhysicsWorldModuleInterface * | pPhysicsWorldModule, |
| plDynamicArray< plGameObject * > & | out_objectsInSensorVolume, | ||
| plDynamicArray< plGameObjectHandle > & | ref_detectedObjects, | ||
| bool | bPostChangeMsg ) const |
Updates the sensor state right now.
If the update rate isn't set to 'Never', this is periodically done automatically. Otherwise, it has to be called manually to update the state on demand.
Afterwards out_objectsInSensorVolume will contain all objects that were found inside the volume. ref_detectedObjects needs to be provided as a temp array, but will not contain a usable result afterwards, call GetLastDetectedObjects() instead.
If bPostChangeMsg is true, plMsgSensorDetectedObjectsChanged is posted in case there is a change. Physical visibility checks are skipped in case pPhysicsWorldModule is null.
Returns true, if there was a change in detected objects, false if the same objects were detected as last time.
|
overridevirtual |
Override this to save the current state of the component to the given stream.
Reimplemented from plComponent.
Reimplemented in plSensorConeComponent, plSensorCylinderComponent, and plSensorSphereComponent.